
DU-BLE
Definición y objetivo de sensor

El sensor inalámbrico de ángulo de la marca ESCORT, con fuente de alimentación autónoma DU-BLE (también denominado como: sensor, producto, sensor de ángulo, DU-BLE) está diseñado para medir el ángulo de inclinación en máquinas y mecanismos en base al horizonte seleccionado y en interacción con la gravedad de la Tierra. También se puede determinar el sentido de rotación (en los modos operacionales apropiados) y la transmisión de estos datos a través de un canal de radio frecuencia de 2,4 GHz.
El dispositivo de medición “DU BLE” se puede utilizar en vehículos de motor y otros objetos donde se requiere la medición de ángulos de inclinación.
DU-BLE es el sensor completamente inalámbrico con fuente de alimentación autónoma. Los datos del sensor se transmiten como los paquetes Bluetooth en el modo Advertising; los paquetes de datos se envian cada 3 segundos.
Unas características más detalladas están presentado en la especificación del dispositivo.
Términos y conceptos básicos
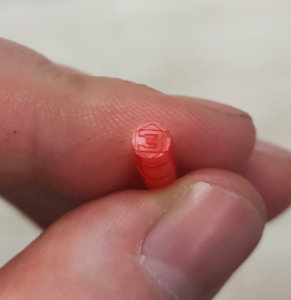
- Número de la serie es un código que consiste en una serie de letras o números asignados a un producto (sensor).
- Nombre del sensor es una designación del sensor entre los dispositivos BLE, que consta de las dos primeras letras del modelo del sensor y los últimos 6 valores del número de serie; por ejemplo, DU_100100.
- Dirección MAC es un identificador único asignado a cada pieza del equipo activo. Se utiliza para reconocer dispositivos en la red.
- Paquete de los datos es un conjunto de los valores transmitidos por un dispositivo equipado con un transmisor Bluetooth, cuya estructura está determinada por un protocolo de la transmisión de datos.
- Protocolo de la transmisión de los datos es un conjunto de reglas o convenciones específicas de una interfaz de nivel lógico que define el intercambio de los datos entre varios programas o dispositivos. En el caso del sensor DU-BLE, el protocolo Escort BLE se utiliza para transmitir paquetes de los datos.
- Modo Advertising es un modo de transmisión de los datos en el que el dispositivo "distribuye" paquetes de los datos a una frecuencia determinada, independientemente de la presencia de un dispositivo que recibe los datos.
- Modo Connection es un modo de transmisión de los datos en el que el transmisor espera una conexión con el dispositivo receptor para comenzar a transmitir paquetes de los datos.
- Base RS-485\USB es dispositivo que retransmite los datos y los convierte de un paquete Bluetooth en un paquete de datos transmitido a través de la interfaz RS-485 de acuerdo con el protocolo LLS.
- Base BA-BLE es un dispositivo que retransmite los datos y los convierte de un paquete Bluetooth a un paquete de los datos transmitido a través de las interfaces RS-485 y RS-232 de acuerdo con el protocolo LLS.
Diseño de DU-BLE
Diseño de DU-BLE de la primera generación

Diseño de DU-BLE de la generación actual

Conectando el sensor a un smartphone
Para configurar el sensor DU-BLE, debe usar la aplicación Escort Configurator disponible en dispositivos iOS y Android (en adelante, la "aplicación").
Ubicación y Bluetooth
Abra el configurador. Asegúrese de darle acceso a su geolocalización. Active el Bluetooth y la geolocalización de su smartphone como se representa en estas capturas de pantalla.


Conectando el sensor

Toque en el botón de Ajustes del sensor. Luego, seleccione DU-BLE.


Busque un sensor en particular introduciendo los últimos 6 dígitos de su número de serie. El número de serie se puede encontrar en la cabeza del sensor. O simplemente encuentre el sensor que necesita en la lista y toque el botón Conectar. Al usar un dispositivo Android, también puede tocar el sensor para abrir el menú desplegable que muestra los datos recibidos en el modo Advertising.


Manejar la contraseña
Nosotros recomendamos insistentemente establecer la contraseña en el sensor para limitar el acceso al cambiar la configuración del dispositivo. Si se conecta al sensor por primera vez, la aplicación pide establecer la contraseña automáticamente.
Puede establecer, cambiar y borrar la contraseña en el menú Opciones adicionales

En la pestaña con los ajustes de la contraseña introduzca una contraseña que se utilizará en el futuro y toque el botón Establecer.

¡ATENCIÓN! EL REINICIO DE LA CONTRASEÑA ES UN PROCESO COMPLICADO POR ESO RECOMENDAMOS ESTABLECER Y MANEJAR LA CONTRASEÑA CON TODA RESPONSABILIDAD.
Además, fíjese que la contraseña no puede empezar con el número 0
Para borrar la contraseña actual debe introducirla en el campo necesario. Después de hacerlo toque el botón Introducir y luego Eliminar.
¡Atencion! El sensor no tiene la contraseña por defecto. Si se conecta a un sensor por primera vez y ve la contraseña ya establecida, por favor, ponga en contacto con el soporte técnico.
Principales parámetros y lecturas del sensor
Una vez entrado en la página Data que está en la página principal del sensor, se puede ver los siguientes parámetros:
- RSSI es un indicador de intensidad de la señal recibida que muestra qué también su teléfono inteligente recibe los datos del sensor; este parámetro NO lo transmite el sensor sino que lo calcula el dispositivo que recibe los datos del mismo
- Vbat o la carga de la batería del sensor (3,5 V o más significa que la batería está completamente cargada; 3,2 V o menos significa que la batería está descargada y debe reemplazarse)
- Número de serie del sensor
- Versión del firmware (en adelante, FW) instalado en el sensor
- Modo operacional colocado en el sensor
- La dirección MAC del sensor se usa para emparejar el sensor con los rastreadores compatibles
- Datos operacionales en el modo colocado
- Botón para colocar el ángulo de inclinación actual como 0

Las caídas de carga de la batería a 3,2 V o menos que duran de 10 a 15 minutos son aceptables (especialmente si sucede después de reiniciar el sensor quitando la batería y luego volviéndola a colocar). Esto sucede porque todos los procesos que ejecuta el sensor (medición de nivel, temperatura y carga de la batería, así como la transmisión de los paquetes de datos BLE) se sincronizan y, por lo tanto, el consumo de energía del dispositivo aumenta mientras que el voltaje de la batería disminuye.
Modos operacionales
Para colocar un modo operacional, abra menú Configuraciones.

| Modo operacional | Descripción del modo | Formato de transmitir los datos |
| Inoperacional | Se utiliza para transportación o almacenamiento del sensor. Acelerómetro está apagado para guardar la energía; el sensor no mide. | |
| Control de rotación vertical | Se utiliza para detectar la dirección de rotación del sensor en el plano que es paralelo hacia el plano donde se instala el sensor (excepto la rotación paralela hacia la tierra) y\o para calcular la cantidad de revoluciones y RPM (revoluciones por minuto).
Rotación horizontal. El sensor se instala a lo largo del eje de rotación (de una hormigonera, por ejemplo); la parte convexa del sensor dirigida hacia arriba en el ángulo de 90° Rotación vertical. El sensor se instala perpendicular al eje de rotación (de una hormigonera, por ejemplo) |
1. Solo dirección 0 signifuca que no hay rotación 1 es rotación a un lado 2 es rotación a otro lado (se puede colocar otros valores en vez de 1 y 2; el valor 0 no se cambia) 2. Solo RPM Se transmiten 2 parámetros de rotación: revoluciones en total, velocidad de rotación (RPM) |
| Control de rotación horizontal | ||
| Contenedor | Sirve para controlar el evento de carga de un vehículo. Por ejemplo, camión de basura.
El contador de los eventos de notificación no se restablece hasta que cambie el modo operacional. |
Se transmiten el ángulo de inclinación y el contador (desde 0 hasta 65535) de los eventos de notificación |
| Cuchara | Sirve para controlar el trabajo de excavadora o una máquina similar. | Se transmiten el ángulo de inclinación y el evento de notificación si el mecanismo está activo o inactivo |
| Hoja | Sirve para controlar el trabajo de hoja de las quitanieves o una máquina similar. | Se transmiten el ángulo de inclinación y el evento de notificación si el mecanismo está activo o inactivo |
| Control de ángulo | Sirve para detectar el ángulo de inclinación de las partes de mecanismo con respecto al horizonte. Los eventos de notificación se generan al lograr un ángulo colocado por usario | Se transmiten el ángulo de inclinación y el evento de notificación si el mecanismo clave está levantado o bajado |
| Clinómetro horizontal | En el modo 1 eje el sensor detecta inclinación solo dentro de un eje (cabeceo) desde una posición cero que debe colocarse después de elegir el modo e instalar el sensor. El mecanismo, a su turno, debe estar en la superficie llana y en posición de marcha. El ángulo mide desde 0 hasta 360 grados.
En el modo 2 ejes se detecta inclinación dentro de cada eje por separado. |
Se transmiten el ángulo de alabeo y cabeceo
0-360° para un eje 0-180° para otro eje |
| Clinómetro vertical | En el modo 1 eje el sensor detecta inclinación solo dentro de un eje (cabeceo) desde una posición cero que debe colocarse después de elegir el modo e instalar el sensor. El mecanismo, a su turno, debe estar en la superficie llana y en posición de marcha. El ángulo mide desde 0 hasta 360 grados.
En el modo 2 ejes se detecta inclinación dentro de cada eje por separado. |
Se transmiten el ángulo de alabeo y cabeceo
0-360° para un eje 0-180° para otro eje |
Control de rotación vertical



- Elegir el formato de los datos transmitidos (Solo dirección (1) o Solo RPM (3))
- Colocar valores que se transmitirán como los eventos de rotación a un lado u otro; disponible solo en el formato Solo dirección
El sensor se instala en el extremo del objeto rotatorio.
Este modo tiene 2 formatos de los datos transmitidos:
1) Solo dirección (1) se aplica, por ejemplo, para controlar la dirección de rotación de la hormigonera. El evento de notificación se transmite dependiendo de la dirección de rotación alrededor del eje (2); si gira a un lado, se transmite el valor 1, si gira al otro, se transmite el valor 2, si no hay rotación, se transmite 0.
El valor de la dirección de rotación puede ser cambiado dentro de rango 1 - 255.
2) Solo RPM (3). El sensor transmite el número actual de revoluciones y la velocidad de rotación en RPM. La velocidad de rotación se calcula solo después de que el sensor haga 3 revoluciones completas. El valor RPM puede ser positivo o negativo dependiendo de la dirección de rotación.
En cuanto a configurar la detección de RPM en una plataforma de monitoreo, puede examinar este manual.


Control de rotación horizontal

- Elegir el formato de los datos transmitidos (Solo dirección (1) o Solo RPM (3))
- Colocar valores que se transmitirán como los eventos de rotación a un lado u otro; disponible solo en el formato Solo dirección
El sensor se instala en la parte lateral del objeto rotatorio
¡En el modo Control de rotación horizontal el sensor se instala de manera que su parte convexa se dirija hacia arriba o abajo en el ángulo de 90°! ¡Si el sensor se instala con su parte convexa dirigida a la derecha o izquierda, la rotación no se detectará!
Este modo tiene 2 formatos de los datos transmitidos:
1) Solo dirección (1) se aplica, por ejemplo, para controlar la dirección de rotación de la hormigonera. El evento de notificación se transmite dependiendo de la dirección de rotación alrededor del eje (2); si gira a un lado, se transmite el valor 1, si gira al otro, se transmite el valor 2, si no hay rotación, se transmite 0.
El valor de la dirección de rotación puede ser cambiado dentro de rango 1 - 255.
2) Solo RPM (3). El sensor transmite el número actual de revoluciones y la velocidad de rotación en RPM. La velocidad de rotación se calcula solo después de que el sensor haga 3 revoluciones completas. El valor RPM puede ser positivo o negativo dependiendo de la dirección de rotación. En cuanto a configurar la detección de RPM en una plataforma de monitoreo, puede examinar este manual.


Contenedor


Sirve para controlar el evento de carga de un vehículo. Por ejemplo, camión de basura, volquete etc. (incluso el control más preciso del abrir y cerrar las tapas)
Después de instalar el sensor, es necesario establecer el 0. El objeto debe estar en la superficie llana. Al lograr el Límite inferior y superior, el sensor aumenta el número de los eventos de notificación; así, en el parámetro del evento de notificación se transmitirá el número total de los avisos de carga o descarga.

Al superar la línea azúl (Límite superior), el número se aumenta a 1; para el evento nuevo es necesario que el sensor supere la línea verde (Límite inferior)
Línea negra es Cero
Línea verde es Límite inferior
Línea azúl es Límite superior
Así, el número de avisos sigue aumentarse hasta el valor máximo, 65535. Después el número empieza desde el 0 para aumentarse de nuevo. Si consideramos 100 avisos al día, el número se aumenta hasta el valor máximo durante 1-2 años.
La configuración de los datos recibidos en una plataforma de monitoreo se describe en este manual.
Cuchara


Este modo se aplica para controlar el trabajo de excavadoras.
Nivel de suavizado. Indica cuanto más intenso se suavizan los datos del ángulo de inclinación durante los cambios bruscos.
Delta es un ángulo mínimo necesario para que el sensor detecte el aviso de evento.
Desactivar en es un periodo en segundos dentro del que el sensor transmite el aviso de evento (en el caso de que la cuchara deje de moverse).
Intervalo de medida es un intervalo en segundos de acuerdo con el que el sensor mide el ángulo de inclinación para calcular la Delta.
Transmitir como el aviso de evento es un valor que se transmitirá como el aviso de evento.
En Intervalo de medida se coloca un intervalo en segundos de acuerdo con el que el sensor mide el ángulo de inclinación. Después de que el intervalo se acabe, el sensor compara el ángulo de inclinación actual con el anterior (que, a su turno, fue medido después del intervalo anterior). Si la diferencia es más que el valor Delta (o igual a él), se detecta el aviso de evento que significa que la excavadora sí trabaja. El parámetro Delta es un ángulo mínimo necesario para que el sensor detecte el aviso de evento. Si la excavadora deja de trabajar, la diferencia entre los ángulos no superará la Delta; así que se inicia el temporizador Desactivar en después del que el sensor deja de transmitir el aviso de evento (transmite el valor 0). Así, se dividen los periodos de actividad e inactividad de la excavadora sin los avisos de evento falsos.
La configuración de los datos recibidos en una plataforma de monitoreo se describe en este manual.
En cuanto a instalar DU-BLE en la cuchara de excavadora, se recomienda situar el sensor en una parte de mecanismo que es más activa (hace movimientos más amplios que el resto del mecanismo).


Hoja


El modo se aplica para los mecansimos del tipo de hoja; e.g. quitanieves o empujadores.
Nivel de suavizado. Indica cuanto más intenso se suavizan los datos del ángulo de inclinación durante los cambios bruscos.
Límite superior es un límite más alto de cual el aviso de evento no se detecta
Límite inferior es un límite mínimo más bajo de cual el aviso de evento se detecta (después de que se exceda el tiempo colocado en Activar en)
Activar en es un valor en segundos que indica el periodo (dentro de que el sensor está bajo de Límite inferior) de empezar a transmitir el aviso de evento
Desactivar en es un valor en segundos que indica el periodo (dentro de que el sensor está entre los Límites inferior y superior) de detener el aviso de evento
Transmitir como aviso de evento es un valor que se transmitirá como el aviso de evento
¡OJO! No es recomendable utilizar el sensor para controlar los mecanismos que cambian su ángulo de inclinación dentro de 10° o menos. Por ejemplo, hoja media de la autoniveladora.
Al cruzar el Límite inferior hacia el ángulo menor, el sensor inicia el temporizador Activar en. Cuando el temporizador se acaba (el sensor no debe superar el Límite inferior durante este periodo), el aviso de evento empieza a transmitirse (1 o cualquier otro valor que necesita excepto de 0).
Al cruzar el Límite inferior hacia el ángulo mayor, el sensor inicia el temporizador Desactivar en. Cuando el temporizador se acaba (el sensor no debe cruzar el Límite inferior durante este periodo), el aviso de evento deja de transmitirse (empieza a transmitirse el valor 0).
Si el sensor cruza el Límite inferior hacia el ángulo menor durante el temporizador Desactivar en, el aviso de evento no se quita.
Al cruzar el Límite superior hacia el ángulo mayor en la misma situación, el aviso de evento se quita sin retraso.
Esta lógica se explica por recibir los reportes más transparentes sin avisos de evento muy cortos que significan mayormente llevar y bajar el mecanismo para evitar diferentes obstáculos.
El 0 se establece cuando el mecanismo está en la posición de funcionamiento

La configuración de los datos recibidos en una plataforma de monitoreo se describe en este manual.
Control de ángulo


El modo Control de ángulo suele aplicarse para e.g. controlar el mecanismo del camión de recogida de basura, volquete etc.
Nivel de suavizado. Indica cuanto más intenso se suavizan los datos del ángulo de inclinación durante los cambios bruscos.
Límite superior es un límite más alto de cual se detecta el aviso de evento.
Límite inferior es un límite mínimo más bajo de cual el aviso de evento no se detecta.
Transmitir como aviso de evento es un valor que se transmitirá como el aviso de evento
Al aumentar el ángulo de inclinación y superar el Límite superior, el sensor empieza a transmitir el aviso de evento. Luego, al bajar el ángulo de inclinación y cruzar el Límite inferior, el sensor deja de transmitir el aviso de evento (se transmite el valor 0)

IMPORTANTE: El acelerómetro de tres ejes en el sensor no puede evitar responder a las vibraciones, aceleraciones, frenadas y características del terreno.
Por lo tanto, el sensor no es muy adecuado para controlar el funcionamiento de los mecanismos de los equipos que realizan trabajos como, por ejemplo, el vertido del asfalto, ya que durante tales trabajos, la descarga se realiza con la carrocería levantada en un ángulo bajo y en el movimiento del vehículo, lo que excluye la posibilidad de una validación confiable de las lecturas del sensor de acuerdo con la velocidad de la unidad.
En otros casos, las lecturas del Sensor se pueden validar por la velocidad.
Detalles de tal tipo de validación se describen en este manual (p.19)
El sensor también tiene el algoritmo de filtración, pero cuando la filtración está activada, la medición del ángulo se ralentiza, lo que puede provocar que se omitan los avisos del evento reales.
Otra opción es instalar el segundo sensor en el bastidor del vehículo y ajustar el modo Maestro-Esclavo entre 2 sensores de ángulo colocados en la misma unidad. Para configurar esto, le pueden ayudar los pasos descritos en este manual (a partir de la p. 17)
La configuración de los datos recibidos en una plataforma de monitoreo se describe en este manual.
Clinómetro horizontal


En el modo Clinómetro el sensor mide el ángulo y la dirección de inclinación.
Nivel de suavizado. Indica cuanto más intenso se suavizan los datos del ángulo de inclinación durante los cambios bruscos.
Modo 1 eje. Se mide el ángulo de inclinación dentro del eje X (en este caso, alabeo) en la posición horizontal. Es decir, los planos Z e Y son perpendiculares al plano donde se hace la instalación. Se puede establecer el 0. El rango de medición es 360°. El aviso de evento no se incluye.
Modo 2 ejes. Se mide el ángulo de inclinación dentro del eje Y (en este caso, alabeo) y dentro del eje X (en este caso, cabeceo) en la posición horizontal. Se puede establecer el 0. El rango de medición es 180°. El aviso de evento no se incluye.
En el modo Clinómetro horizontal el DU-BLE transmite sus datos solo a través de BA-BLE

Clinómetro vertical

En el modo Clinómetro el sensor mide el ángulo y la dirección de inclinación.
Nivel de suavizado. Indica cuanto más intenso se suavizan los datos del ángulo de inclinación durante los cambios bruscos.
Modo 1 eje. Se mide el ángulo de inclinación dentro del eje Z (en este caso, alabeo) en la posición vertical. Es decir, los planos X e Y son paralelos al plano donde se hace la instalación. Se puede establecer el 0. El rango de medición es 360°. El aviso de evento no se incluye.
Modo 2 ejes. Se mide el ángulo de inclinación dentro del eje Y (en este caso, alabeo) y dentro del eje Z (en este caso, cabeceo) en la posición vertical. Se puede establecer el 0. El rango de medición es 180°. El aviso de evento no se incluye.
En el modo Clinómetro vertical el DU-BLE transmite sus datos solo a través de BA-BLE

Sellado y montaje
Dimensiones de montaje
Dimensiones de montaje del DU-BLE diseño anterior


Dimensiones de montaje del DU-BLE diseño actual


Sellado de sensor
Sellado del DU-BLE de diseño anterior
Para sellar el sensor y evitar que alguien lo saque del tanque sin que usted o usted se den cuenta, coloque la tapa protectora del sensor sobre su cabeza y luego pase el cable del sello a través de los orificios de ajuste. Luego pase el cable a través del sello mismo y apriételo alrededor de la tapa del sensor. Corta el cable sobrante como mejor te parezca.

Sellado del DU-BLE de diseño actual
Necesita la tapa protectora y el sello del kit
-

Tapa protectora
-
Sello de DU-BLE


Debe montar la tapa al sensor

Luego inserte completamente el sello en cierto orificio, el fin cubierto del sello debe estar afuera
-

Instalar sello
-

DU-BLE con sello instalado


Para quitar el sello, utilice la llave especial del kit; también puede utilizar cualquier tornillo del tamaño necesario para atornillarlo en el sello y sacarlo.


Así, es imposible quitar el sello sin dañarlo. Eso proporciona el sensor con una protección adicional.
Sellado alternativo del DU-BLE diseño actual
Además, hay sello alternativo en el kit, si es necesario utilizar un sello con número
- Debe pasar el cable de acero a través del orificio en la tapa de sensor

- Pasar ambos extremos del cable a través del orificio en la cabeza de sensor

- Pasar ambos extremos a través del sello, apretar el cable y montar el sello presionando a la parte sobresalida

Instalar en el tanque y dirigir el transmisor
El método de fijación más común es la instalación en tornillos autorroscantes con una arandela. También se puede instalar en tuercas de crimpado roscadas, casquillos de soldadura y otros elementos estructurales. El Sensor se puede instalar en lugares previamente preparados con tornillos y pernos de al menos 4.8 grados de resistencia. En este caso, es necesario garantizar la estanqueidad de la conexión de la carcasa del Sensor y el recipiente. Para mayor protección, se permite el uso de un sellador resistiente al aceite de motores.
Se pueden usar remaches y pernos para los tanques del plástico.
El sensor debe instalarse de manera que su transmisor apunte hacia el receptor. La ubicación del transmisor en diferentes modelos DU-BLE se muestra a continuación.

¿Qué tan apretados deben estar los tornillos?

Actualización del FW

Para actualizar el FW del DU-BLE:
- Descargue la versión actual del FW como un archivo y guárdelo en la memoría de su smartphone
- Conéctese al sensor
- Abre el menú Opciones adicionales

- Abre el menú Actualización de FW

- Seleccione el archivo del FW (1) desde el smartphone (el arcivo tiene el formato .zip, no es necesario extraerlo) y comience el proceso del actualizar (2). ¡Estes pasos deben ser cumplidos dentro de los 30 segundos después de abrir el menú Actualización de FW!


- El proceso de la actualización debe iniciarse. ¡No se puede cerrar o minimizar la aplicación Escort durante el proceso!

- Al terminar la actualización, la aplicación muestra el aviso de una actualización exitosa

Todas las versiones actuales del FW se encuentran en la partición Descargas
No es necesario extraer el archivo .zip del FW