
Diferencia entre revisiones de «ECargoSens»
Sin resumen de edición |
|||
| (No se muestran 41 ediciones intermedias de 2 usuarios) | |||
| Línea 1: | Línea 1: | ||
[[en:eCargosens| English version]] | [[en:eCargosens| English version]] | ||
[[ru:eCargosens| Русская версия]] | [[ru:eCargosens| Русская версия]] | ||
[[ | [[Archivo:ECargoSens diseño actual.png|miniaturadeimagen|341x341px|'''<big>eCargoSens, diseño actual</big>''']] | ||
El sistema de monitoreo de carga '''eCargosens''' (en adelante, '''el sistema''') para vehículos con suspensión neumática está diseñado para monitorear la carga de cada eje del chasis del vehículo, basándose en la medición de la presión del aire en el sistema de suspensión neumática. | El sistema de monitoreo de carga '''eCargosens''' (en adelante, '''el sistema''') para vehículos con suspensión neumática está diseñado para monitorear la carga de cada eje del chasis del vehículo, basándose en la medición de la presión del aire en el sistema de suspensión neumática. | ||
| Línea 9: | Línea 9: | ||
Los Sensores miden la presión del aire y, posteriormente, el peso (carga). La unidad central sirve como retransmisor entre los sensores y un equipo GPS. | Los Sensores miden la presión del aire y, posteriormente, el peso (carga). La unidad central sirve como retransmisor entre los sensores y un equipo GPS. | ||
Unas características más detalladas de '''la unidad central''' están | Unas características más detalladas de '''la unidad central''' están presentadas en [https://www.fmeter.ru/download/_ftp/eng/eCargosens-wireless-axle-load-monitoring-system/Datasheet%20Escort%20Central%20Unit%20eCargosens%20DS.pdf?v=050623133704 la especificación del dispositivo]. | ||
Unas características más detalladas del '''sensor''' están | Unas características más detalladas del '''sensor''' están presentadas en [https://www.fmeter.ru/download/_ftp/eng/eCargosens-wireless-axle-load-monitoring-system/Datasheet%20Escort%20Axle%20Load%20Sensor%20eCargosens%20Air.pdf?v=050623133704 la especificación del dispositivo]. | ||
= '''<big>Principio del funcionamiento y transmisión de los datos</big>''' = | = '''<big>Principio del funcionamiento y transmisión de los datos</big>''' = | ||
Los sensores deben estar conectados al sistema de suspensión neumática del vehículo. Miden la presión del aire en la suspensión neumática y calculan el peso que se distribuye en un eje particular basándose en una tabla de calibración que deben crear y guardar en su memoria. | Los sensores deben estar conectados al sistema de suspensión neumática del vehículo. Miden la presión del aire en la suspensión neumática y calculan el peso que se distribuye en un eje particular basándose en una tabla de calibración que deben crear y guardar en su memoria. | ||
[[Archivo:Componentes de eCargoSens 1.png|no|miniaturadeimagen|786x786px|'''<big>Sensor y unidad central de sistema eCargoSens</big>''']] | |||
El/los Sensor(es) transmiten sus parámetros a la unidad central a través de '''Bluetooth 5.0 LR''' de acuerdo con el protocolo de comunicación de datos '''Escort eCargoSens'''. | |||
Los sensores transmiten sus paquetes de datos '''cada 2 segundos'''. | |||
La presión del aire se mide '''cada 30 segundos''', pero las mediciones se filtran ('''filtración es 5 medidas''') y luego se procesan mediante '''un algoritmo especial'''. | |||
Luego, la unidad central retransmite lo recibido desde los sensores a un equipo GPS, a través de la interfaz '''RS-485''', de acuerdo con el protocolo de comunicación '''LLS'''. | |||
'''<big>Los parámetros transmitidos por el(los) Sensor(es) son:</big>''' | |||
''' | * '''Peso''' o carga por eje en '''kg''' (siempre que la tabla de calibración esté almacenada en la memoria de un Sensor); | ||
* '''Presión del aire''' en '''Pa'''; | |||
* '''Voltaje''' de la batería en '''V'''; | |||
'''<big>Los parámetros retransmitidos por la unidad central son:</big>''' | |||
* '''Peso''' o carga por eje en '''kg''' (siempre que '''la tabla de calibración''' esté almacenada en la memoria de un Sensor); tal como se recibió del(los) Sensor(es); | |||
* '''Presión del aire''' en '''Pa'''; tal como se recibió del(los) Sensor(es); | |||
* '''Voltaje''' de la batería en '''V'''; tal como se recibió del(los) Sensor(es); | |||
* '''RSSI''' (indicador de la establilidad de conexión entre la unidad central y el sensor) <u>calculado por la unidad central para cada Sensor en particular</u> | |||
'''<big> | === '''<big>Nota para desarrolladores</big>''' === | ||
La unidad central retransmite los parámetros según el protocolo LLS en respuesta a la solicitud de nivel de combustible y temperatura (debido a que el protocolo LLS fue diseñado inicialmente para la transmisión del sensor de nivel de combustible) | |||
- | 31$XX$06$CRC-8 Maxim (XX representa la dirección de red de 00 a FF en HEX (0…255 en DEC)); | ||
- | La salida de datos se transmite como 3E$XX$06$TT$LVLV$CRC-8 Maxim, donde | ||
- | XX -dirección de red, | ||
- | TT - parámetro de temperatura (1 byte, valor HEX), | ||
LVLV - valor de nivel (2 bytes, little endian); | |||
Por tanto, se utiliza una dirección de red para transmitir un par de parámetros enviados por el/los Sensor(es) y retransmitidos por la unidad central. | |||
- | Las lecturas de presión se transmiten después de dividirlas por 100. Ejemplo: Si la lectura de presión es 700345 Pa pero el valor transmitido a través de la interfaz RS-485 será 7003. | ||
{| class="wikitable" | |||
|+<big>Tabla 1. Tabla de parámetros</big> | |||
!<big>Par de parámetros (como se indica en la configuración RS-485 de la unidad central)</big> | |||
!<big>Parámetro de temperatura</big> | |||
!<big>Parámetro de nivel</big> | |||
|- | |||
|[[Archivo:Peso, RSSI.png|308x308px]] | |||
|RSSI (instensidad de señal bluetooth) | |||
|Peso (kg) | |||
|- | |||
|[[Archivo:Presión, RSSI.png|308x308px]] | |||
|RSSI (instensidad de señal bluetooth) | |||
|Presión (Pa) | |||
|- | |||
|[[Archivo:Peso, Vbat.png|308x308px]] | |||
|Vbat (voltaje de batería) | |||
|Peso (kg) | |||
|- | |||
|[[Archivo:Presión, Vbat.png|308x308px]] | |||
|Vbat (voltaje de batería) | |||
|Presión (Pa) | |||
|- | |||
|[[Archivo:Vbat, RSSI.png|308x308px]] | |||
|RSSI (instensidad de señal bluetooth) | |||
|Vbat (voltaje de batería) | |||
|} | |||
<blockquote>'''¡OJO!''' El rastreador GPS al que planea conectar la unidad central debe tener la interfaz RS-485, el protocolo LLS y admitir tantas direcciones de red como necesite para la transmisión de todos los parámetros relevantes del sensor.</blockquote> | |||
= '''<big>Instalación y configuración del sistema eCargoSens</big>''' = | |||
'''<big>Antes de instalar el sensor es necesario:</big>''' | |||
* Inspeccionar el sistema de suspensión neumática; | |||
* Medir el diámetro de los tubos que conectan los muelles neumáticos de la suspensión neumática y disponer de los accesorios para poder conectar los tubos de los Sensores a los tubos de la suspensión neumática; | |||
''' | El diámetro estándar de los tubos del sensor es de '''⌀ 10 mm'''. | ||
La conexión del sensor a la cámara de aire se muestra en las siguientes figuras. | |||
[[Archivo:1 es bolsa de aire, 2 es tubo de forma T, 3 es sensor eCargoSens Air, P es presión.png|no|miniaturadeimagen|532x532px|'''<big>1 es bolsa de aire de vehículo,</big> <big>2 es tubo de forma T</big><big>,</big> <big>3 es sensor eCargoSens Air</big><big>,</big> <big>P</big> <big>es presión</big>''']] | |||
[[Archivo:1 es bolsa de aire, 2 es tubo de forma T, 3 es sensor eCargoSens Air, P es presión (2).png|no|miniaturadeimagen|590x590px|'''<big>1 es bolsa de aire de vehículo, 2 es tubo de administración de aire, 3 es sensor eCargoSens Air, P es presión</big>''']] | |||
[[Archivo:Instalación en un eje de camión (1).png|no|miniaturadeimagen|631x631px|'''<big>Instalación en un eje de camión (1)</big>''']] | |||
[[Archivo:Instalación en un eje de camión (2).png|no|miniaturadeimagen|633x633px|'''<big>Instalación en un eje de camión (2)</big>''']] | |||
[[Archivo:Instalación en un semirremolque (6 bolsas de aire, 3 ejes, 3 sensores).png|no|miniaturadeimagen|900x900px|'''<big>Instalación en un semirremolque (6 bolsas de aire, 3 ejes, 3 sensores)</big>''']] | |||
Antes de instalar el sensor, asegúrese de '''anotar''' sus '''números de serie y direcciones MAC''' y en qué eje se instalará cada sensor. Además, anote las '''direcciones de red''' colocadas en la unidad central que se utilizarán para la transmisión de los datos de cada sensor. | |||
'''<big>Ejemplo:</big>''' | |||
{| class="wikitable" | |||
|+ | |||
|'''<big>Eje</big>''' | |||
|'''<big>Número de serie de sensor (6 últimos dígitos)</big>''' | |||
|'''<big>Dirección MAC</big>''' | |||
|'''<big>Direcciones de red</big>''' | |||
|- | |||
|eje trasero de camión | |||
|XXXXXX | |||
|AA:AA:AA:AA:AA:AA | |||
|3,4 | |||
|- | |||
|eje delantero de semirremolque | |||
|ZZZZZZ | |||
|BB:BB:BB:BB:BB:BB | |||
|5,6 | |||
|} | |||
[[Archivo:Número de serie de sensor.png|no|miniaturadeimagen|464x464px|'''<big>Número de serie de sensor</big>''']] | |||
== '''<big>Emparejamiento de sensores con la unidad central</big>''' == | |||
Una vez instalados los sensores, es necesario emparejarlos con la unidad central y configurarlos. | |||
''' | Para conectar la unidad central y configurarla a través de la aplicación, conecte sus cables '''rojo (PWR)''' y '''negro (GND)''' a una fuente de alimentación. | ||
''' | Ejecute la aplicación (disponible en '''AppStore''' y '''Google Play'''), asegúrese de que '''el servicio de geolocalización''' de su teléfono esté activado y que la aplicación tenga permiso para acceder a él. | ||
Habilite '''el Bluetooth'''. | |||
'''<big>Android eCargosens:</big>''' [https://play.google.com/store/apps/details?id=com.weightcontrol.ae enlace para descargar] | |||
[[ | '''<big>IOS eCargosens:</big>''' [https://apps.apple.com/ru/app/ecargosens/id1578223350 enlace para descargar.] | ||
[[Archivo:Ubicacion2.png|no|miniaturadeimagen|678x678px|'''<big>Ubicación y Bluetooth activados</big>''']] | |||
Luego seleccione el idioma si es necesario y presione '''''Comenzar'''''. Seguidamente, toque la unidad central que necesita.<gallery mode="nolines" widths="320" heights="670"> | |||
Archivo:Pantalla inicial.png|alt= | |||
Archivo:Lista de los sensores Air encontrados.png|alt= | |||
</gallery>Toque '''''Configuración de sensores'''''. Ingrese la contraseña del integrador ('''666666 por defecto''')<gallery mode="nolines" widths="320" heights="670"> | |||
Archivo:Abrir Configuracion de sensores Air.png|alt= | |||
Archivo:Ingresar contraseña de integrador.png|alt= | |||
</gallery>Toque el botón [[Archivo:Añadir el sensor eCargoSens.png|46x46px]] y elige '''''Conectar sensor eCargoSens Air'''''. Ingrese la contraseña de usuario ('''000000 por defecto''').<gallery mode="nolines" widths="300" heights="650"> | |||
Archivo:Añadir sensor Air.png|alt= | |||
Archivo:Conectar sensor eCargoSens Air.png|alt= | |||
Archivo:Ingresar contraseña de usario.png|alt= | |||
</gallery> | |||
Luego ingrese '''el MAC''' del sensor y pulse '''''Conectar'''''. | |||
[[Archivo:Ingresar MAC de sensor Air.png|659x659px]] | |||
[[ | |||
Después agregue tantos sensores como sea necesario (hasta '''10 sensores''' a una unidad central). Para desconectar el sensor, '''manténgalo presionado''' hasta que aparezca el botón '''''Desconectar''''', luego presione y borre el sensor.<gallery mode="nolines" widths="320" heights="670"> | |||
Archivo:Sensor Air añadido.png|alt= | |||
Archivo:Desconectar sensor Air.png|alt= | |||
</gallery> | |||
== '''<big>Calibración de sensores</big>''' == | |||
Para '''calibrar el sensor''', debe '''pesar cada eje''' en el que está instalado. Es importante hacerlo '''2 veces'''. | |||
<u>1)</u> cuando el semirremolque o remolque del vehículo está '''vacío'''; | |||
<u>2)</u> cuando está '''cargado''' alrededor del 30-40% de la carga máxima. La carga debe colocarse de manera que garantice que el peso '''se distribuya entre los ejes de manera más o menos uniforme'''. | |||
Necesitará '''básculas para vehículos'''. Coloque la báscula sobre una superficie plana. Asegúrese de que una vez colocado el eje en la báscula quede al mismo nivel que los demás ejes.<blockquote>'''<big>¡Ojo! Es probable que las básculas de unas organizaciones del control de peso no sean aplicables para pesar la unidad ya que estes dispositivos pueden no tener en cuenta el peso de cada eje del vehículo</big>'''</blockquote>Luego anote el valor de presión (se representa en '''''Visualización de datos''''') y el valor de peso (puede ser tomado desde la pantalla digital de las básculas). Así que, necesita dos pares de valores de '''Presión\Peso''' para guardarlos en la memoria de cada Sensor.<blockquote>'''<big>¡Ojo! Es necesario esperar a que el valor de presión se estabilizca. Eso puede tomar algun tiempo a causa de la pequeña demora en transmitir los datos desde el sensor a la unidad central y, luego, al smartphone. Además, después de que la posición del vehículo cambie, la presión en una bolsa de aire puede cambiar también</big>''' | |||
'''<big>Asegúrese que ningún sensor muestra el RSSI de -127dBm (pérdida de conexión) y que el RSSI cambia frecuentemente</big>'''</blockquote>[[Archivo:Uno de los ejes del semirremolque está colocado sobre la báscula. 2280 kg en la pantalla de la báscula.png|no|miniaturadeimagen|886x886px|'''<big>Uno de los ejes del semirremolque está colocado sobre la báscula. 2280 kg en la pantalla de la báscula</big>''']] | |||
''' | Posteriormente, abra la aplicación, conecte la unidad central, abra el menú de '''''Configuración del sensor''''' y seleccione el sensor que necesita calibrar. | ||
Cuando conecte el sensor por primera vez, se le pedirá que configure '''una contraseña'''. A partir de ahí, cada vez que conecte el sensor, la aplicación le pedirá que introduzca la contraseña previamente establecida.<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Sensor Air añadido.png|alt= | |||
Archivo:Ingresar contraseña de usario.png|alt= | |||
</gallery>Una vez que el menú del sensor está abierto, puede ver sus lecturas actuales. | |||
'''< | Toque el botón '''''Calibrar''''' para abrir el menú de calibración.<gallery mode="nolines" widths="300" heights="650"> | ||
Archivo:Menú de sensor Air.png|alt= | |||
Archivo:Contraseña de sensor Air.png|alt= | |||
Archivo:Menú de calibración sensor Air.png|alt= | |||
</gallery>Después, presione el botón [[Archivo:Añadir la línea de calibración eCargoSens.png]] . Luego ingrese la lectura de '''''Presión''''' (de la pantalla con los datos del Sensor) y la lectura de '''''Peso''''' (de la báscula) y toque '''''Ingresar'''''. | |||
''' | Para editar la tabla, '''mantenga presionada''' una de sus líneas y luego agregue una línea más, cambie la seleccionada o elimínela.<gallery mode="nolines" widths="300" heights="650"> | ||
Archivo:Creación de la tabla de calibración Air.png|alt= | |||
Archivo:Editar la tabla de calibración sensor Air.png|alt= | |||
Archivo:Editar la tabla de calibración sensor Air 2.png|alt= | |||
</gallery>Una vez terminada la tabla, toque el botón '''''Guardar'''''. Repita el procedimiento de pesar y configurar la tabla para cada sensor. | |||
[[Archivo:Guardar la tabla de calibración de sensor Air.png|662x662px]] | |||
Puede agregar más de 2 líneas si tiene la posibilidad de pesar cada eje mientras la carga en el semirremolque es diferente, pero '''2 líneas''' serán suficientes en la mayoría de los casos. De todos modos, '''cuantos más pares de valores haya en la tabla, más preciso será el recálculo del peso'''. | |||
El número '''máximo''' de líneas es '''20'''. | |||
== '''<big>Configuración de RS-485</big>''' == | |||
Para habilitar la transmisión de los datos, que la unidad central recibe de los Sensores emparejados con ella vía Bluetooth, a un equipo GPS, mediante '''la interfaz RS-485''', conecte la unidad central y abra el menú de '''''Configuración RS-485'''''. Seleccione uno de los sensores emparejados allí.<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Abrir Configuración RS-485 eCargoSens.png|alt= | |||
Archivo:Elegir el sensor en Configuración RS-485.png|alt= | |||
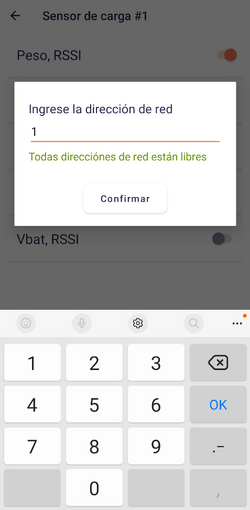
</gallery>Luego seleccione el par de parámetros que necesita transmitir y habilítelo. Después de eso, seleccione la dirección de red que se utilizará para la transmisión de ese par, desde la unidad central al equipo GPS.<gallery widths="250" heights="650"> | |||
Archivo:Elegir parámetros enviados.png|'''<big>Elegir los parámetros enviados por RS-485</big>''' | |||
Archivo:Elegir dirección de red 1.png|'''<big>Ingresar la dirección de red</big>''' | |||
Archivo:Elegir dirección de red 2.png|'''<big>Ingresar la dirección de red, si ya hay direcciones en uso</big>''' | |||
</gallery><blockquote> | |||
'''<big>¡OJO! Asegúrese de que a cada par de parámetros en el menú de cada sensor se le asigne una dirección de red única. Si tiene varios otros sensores cableados conectados al mismo equipo GPS a través de la interfaz RS-485, recuerde que también ya ocupan una o varias direcciones de red, por lo que debe evitar asignar a la unidad central cualquiera de esas direcciones de red</big>'''</blockquote> | |||
Por ejemplo, si hay un sensor de nivel de combustible cableado al que se le ha asignado '''la dirección de red 1''', la dirección 1 '''no se puede''' asignar a la unidad central dicha dirección de red. | |||
Tenga en cuenta que la aplicación podría leer '''''Todas las direcciones de red son libres''''', pero no puede verificar si hay otros sensores cableados conectados a su GPS. Solo verifica qué direcciones de red se han asignado a cada Sensor emparejado en la configuración de la unidad central. | |||
== '''<big> | == '''<big>Visualización de los datos</big>''' == | ||
Usted, su cliente o el conductor del camión pueden acceder '''en cualquier momento''' a las lecturas actuales de sensores vinculadas a '''una cierta unidad central''' que se transmiten a través de la aplicación. | |||
Conecte la unidad central.<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Pantalla inicial.png|alt= | |||
Archivo:Lista de los sensores Air encontrados.png|alt= | |||
</gallery>Luego toque '''''Visualizar datos'''''. En la siguiente pantalla la aplicación mostrará las lecturas de todos los sensores emparejados con la unidad central. <gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Abrir menú Visualizar datos eCargoSens.png|alt= | |||
Archivo:Visualización de datos eCargoSens.png|alt= | |||
</gallery><blockquote>'''<big>¡OJO! Al seleccionar el lugar en el que instalará la unidad central, asegúrese de comprobar si el RSSI promedio de cada sensor, medido en 2 o 3 minutos, está dentro del rango de -35 dBm a -100 dBm. Si no es así, intente acercar la unidad central a los sensores para minimizar los riesgos de pérdidas de conexión en el futuro</big>'''</blockquote> | |||
== '''<big>¿Cuántos sensores se requieren?</big>''' == | |||
La recomendación general es instalar '''tantos sensores como ejes tenga el vehículo'''. En otras palabras: '''1 sensor por 1 eje'''. | |||
''' | Es posible que, en algunos casos, se pueda utilizar '''un sensor''' para controlar la carga en varios ejes, siempre que las cámaras de aire que soportan esos ejes estén unidas en '''un circuito neumático de suspensión'''. | ||
'''<big>Los siguientes son algunos ejemplos de posible instalación de varios sensores:</big>''' | |||
[[Archivo:Circuito de suspensión con 2 pares de bolsas de aire interconectadas.png|no|miniaturadeimagen|501x501px|'''<big>Circuito de suspensión con 2 pares de bolsas de aire interconectadas</big>''']] | |||
'''A''' y '''B''' son posibles ranuras donde se tendrían que instalar los '''2 sensores''' para monitorear la carga de '''cada eje'''. | |||
[[Archivo:Circuito de suspensión con 2 pares de bolsas de aire interconectadas 2.png|no|miniaturadeimagen|472x472px|'''<big>Circuito de suspensión con 2 pares de bolsas de aire interconectadas</big>''']] | |||
En este caso es posible que se pueda instalar '''solo un sensor en el punto A o B'''. | |||
Sin embargo, necesitaría recopilar las lecturas de presión del sensor y '''tener 2 sensores virtuales en su plataforma de monitoreo''' ('''las tablas de calibración''' tendrían que guardarse y aplicarse en esos sensores virtuales). | |||
[[Archivo:Las 4 bolsas de aire están incluidas en el mismo circuito de suspensión.png|no|miniaturadeimagen|487x487px|'''<big>Las 4 bolsas de aire están incluidas en el mismo circuito de suspensión</big>''']] | |||
En este caso es posible que se pueda instalar '''solo un sensor en el punto A o B'''. | |||
Sin embargo, necesitaría recopilar las lecturas de presión del sensor y '''tener 2 sensores virtuales en su plataforma de monitoreo''' ('''las tablas de calibración''' tendrían que guardarse y aplicarse en esos sensores virtuales). | |||
<blockquote>'''<big>¡OJO! Se recomienda insistentemente revisar si el circuito neumático de suspensión no se divide en dos partes, es decir, no es la suspensión neumática de 2 circuitos. Si se divide, una parte del tubo neumático (cortado para que se instale el sensor) puede salir aire, mientras la otra parte mantiene "hinchada". Aún así, instalar solo un sensor puede ser suficiente, pero por ahora no hemos tenido unos casos que confirman la eficacia de este método.</big>'''</blockquote> | |||
[[Archivo:Un circuito complejo formado por 6 bolsas de aire conectadas a un eje (rectángulo rojo).png|no|miniaturadeimagen|568x568px|'''<big>Un circuito complejo formado por 6 bolsas de aire conectadas a un eje (rectángulo rojo)</big>''']] | |||
En este caso se podrían instalar '''6 o 3 Sensores''' ('''1''' o '''2''' por eje) para controlar la carga del eje. | |||
Aún es posible que la carga distribuida entre dos de los tres ejes sea más o menos igual y por lo tanto 1 o 2 sensores podrían ser suficientes. | |||
Sin embargo, si uno de los ejes es '''elevable''', es obligatorio '''instalar''' un sensor en él.<blockquote>'''<big>Si instala los sensores a una suspensión neumática que posee un eje elevable (o los varios así), debe revisar si cambia la presión en las lecturas de cada sensor instalado en la unidad con este(s) eje(s) elevado(s) y bajado(s) (subir y bajar cada eje separademente y en conjunto). Así, según nuestra experiencia, es necesario pesar el vehículo varias veces: 1) con todos los ejes elevables en posición bajada; 2) con uno de los ejes elevables en posición elevada; 3) con todos los ejes elevables en posición elevada</big>'''</blockquote> | |||
== '''<big>Configuración del sensor virtual para el eje de dirección</big>''' == | |||
Para calcular '''el peso total de un camión semirremolque''' es necesario pesar '''tanto el eje de dirección como el eje trasero de un camión (volquete)''' sin semirremolque '''(si es camión volquete, sin carga)'''. Si hay varios ejes delanteros y/o traseros, es necesario pesar '''cada uno de ellos'''. | |||
A continuación, en el menú de '''''Configuración del sensor''''', presione el botón [[Archivo:Añadir el sensor eCargoSens.png|46x46px]] y seleccione la opción '''''Agregar el eje principal''''' (también se llama '''''<u>Agregar cálculo de carga en eje anterior</u>''''')<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Sensor Air añadido.png|alt= | |||
Archivo:Añadir eje de dirección.png|alt= | |||
</gallery> | |||
Después de eso se creará un sensor virtual para un eje direccional y tendrá una '''MAC FF:FF:FF:FF:FF:F1'''. Puede abrir sus configuariones pulsando a su icono. | |||
[[Archivo:Eje de dirección añadida.png|661x661px]] | |||
# En la configuración, complete el '''''Número (ordinal) de eje trasero №1''''' con el número de un sensor instalado en un eje trasero. El número de un sensor está determinado por su posición del 1 al 10 en la lista. | |||
# Introduzca '''el peso de un eje trasero''' sin semirremolque en '''''Carga del eje de tracción №''''' | |||
'''< | - <u>En caso de que haya '''varios ejes traseros'''</u>, agregue '''otro''' presionando el botón [[Archivo:Añadir el sensor eCargoSens.png|42x42px]] y luego ingrese el número de un sensor instalado en él y también su peso sin semirremolque. Para eliminar un eje trasero creado accidentalmente, presione el [[Archivo:Eliminar eje eCargoSens.png|44x44px]].<gallery mode="nolines" widths="320" heights="650"> | ||
Archivo:Configurción de eje de dirección 1.png|alt= | |||
Archivo:Configurción de eje de dirección 2.png|alt= | |||
</gallery> | |||
- <u>En el caso de que haya '''varios sensores''' instalados en '''un eje trasero'''</u>, puede extender la lista de sensores para un eje pulsando el botón [[Archivo:Para extender el eje.png|61x61px]] | |||
[[Archivo:Botón para extender el eje.png|621x621px]] | |||
[[ | |||
Así se observan los números de ejes correspondientes. Estes ejes, a su turno, se promediarán para que el cálculo del eje virtual entienda los sensores instalados en un ejes, no en los ejes diferentes. | |||
[[Archivo:Visualización de 2 sensores en 1 eje tracero.png|713x713px]] | |||
[[ | |||
Para borrar el sensor desde el campo de eje, pulse el botón [[Archivo:Botón de borrar el sensor desde el campo de eje.png|55x55px]] | |||
[[Archivo:Borrar el sensor desde el campo de eje.png|734x734px]] | |||
Luego ingrese los siguientes aspectos: | |||
# '''''Peso de tractocamión sin remolque (o peso de autovolquete vacío)''''' calculado sumando el peso de todos los ejes donde se instalaron los sensores excepto del semirremolque | |||
# '''''Distancia entre eje anterior y eje de tracción'''''; es decir, una distancia entre el centro del eje delantero y el centro del eje trasero del camión sin remolque | |||
# '''''Distancia entre eje anterior y quinterrueda'''''; es decir, una distancia entre el centro del eje delantero y un brazo de arrastre (o el centro de gravedad de un dumper). Este valor '''no debe''' superar o equivaler a la distancia entre el centro del eje delantero y el centro del eje trasero | |||
# '''''Distancia entre ejes de dirrección'''''; es decir, una distancia entre los ejes direccionales delanteros (en caso de que sean dos); si solo hay un eje direccional, introduzca '''el valor mínimo de 51 cm''' | |||
# seleccione el modo '''''de 2 ejes''''', si hay '''dos''' ejes direccionales | |||
Al terminar rellenando dichos datos, presione '''''Guardar'''''. | |||
[[Archivo:Configurción de eje de dirección 3.png|838x838px]] | |||
<blockquote><big>'''¡OJO! La unidad central calcula el peso de un eje direccional y el peso total de un camión semirremolque, solo si las tablas de calibración están guardadas en la memoria de los sensores'''</big></blockquote><blockquote>'''<big>¡ATENCIÓN! Para utilizar correctamente el modo ''de 2 ejes'', se debe añadir a la unidad central un segundo eje de dirección virtual con la misma configuración que el primero. Ambos sensores virtuales deben tener seleccionado el modo ''de 2 ejes''.</big>'''</blockquote>Para '''eliminar''' un sensor virtual de un eje direccional, mantenga presionado su botón hasta que aparezca la opción '''''Desconectar'''''.<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Eliminar eje de dirección 1.png|alt= | |||
Archivo:Eliminar eje de dirección 2.png|alt= | |||
</gallery>Para ver las lecturas del eje de dirección desde '''un dispositivo periférico''' (por ejemplo, un rastreador GPS) a través de la '''interfaz RS-485''', vaya a la sección de '''''Configuración RS-485''''' para seleccionar un sensor virtual de un eje de dirección. Habilite el parámetro '''''Peso, RSSI''''' y establezca '''una determinada dirección de red''' para él.<gallery mode="nolines" widths="320" heights="650"> | |||
Archivo:Configurar transmisión de eje de dirección 1.png|alt= | |||
Archivo:Configurar transmisión de eje de dirección 2.png|alt= | |||
</gallery>Para conectar una unidad central a un '''Indicador I5''' y ver la suma de todos los sensores, incluido el sensor virtual de un eje de dirección, configure el I5 para que pueda '''leer o solicitar las direcciones de red''' configuradas para ciertos sensores en la unidad central. En la configuración de '''pantalla del I5''', seleccione la opción '''''Nivel total TD.''''' | |||
= '''<big>Conexión al equipo GPS</big>''' = | |||
[[Archivo:Conexión física de unidad central eCargoSens.png]] | |||
2 | {| class="wikitable" | ||
|+<big>Tabla 2. Utilización de cables; unidad central eCargoSens</big> | |||
!<big>Color de cable</big> | |||
!<big>Denominación</big> | |||
|- | |||
|<big>naranja</big> | |||
|<big>línea A RS-485</big> | |||
|- | |||
|<big>blanco</big> | |||
|<big>línea B RS-485</big> | |||
|- | |||
|<big>rojo</big> | |||
|<big>+U alimentación</big> | |||
|- | |||
|<big>negro</big> | |||
|<big>-U alimentación</big> | |||
|} | |||
En cuanto al interfaz RS-485, con la unidad central se puede emparejar cualquier dispositivo de otra marca que tiene siguientes parámetros: | |||
Protocolo de transmisión de los datos, '''LLS''' | |||
Baudrate, '''19200 kbps''' | |||
Data size, '''8 bits''' | |||
Parity, '''None''' | |||
Stop bits, '''1''' | |||
'''<big> | = '''<big>Enlaces destacados</big>''' = | ||
* '''<big>[https://www.fmeter.ru/download/_ftp/eng/eCargosens-wireless-axle-load-monitoring-system/Datasheet%20Escort%20Axle%20Load%20Sensor%20eCargosens%20Air.pdf?v=050623133704 Especificación del eCargoSens Air (sensor)]</big>''' | |||
* '''<big>[https://www.fmeter.ru/download/_ftp/eng/eCargosens-wireless-axle-load-monitoring-system/Datasheet%20Escort%20Central%20Unit%20eCargosens%20DS.pdf?v=050623133704 Especificaión del eCargoSens DS (unidad central)]</big>''' | |||
* '''<big>[https://www.fmeter.ru/esp/produktsiya/wireless-axle-load-monitoring-system/ecargosens/#active Página de producto]</big>''' | |||
* '''<big>[https://www.fmeter.ru/esp/download/#ecargosens Materiales para descargar]</big>''' | |||
* '''<big>[https://www.fmeter.ru/download/_ftp/eCargosens-wireless-axle-load-monitoring-system/% | |||
* '''<big>[https://www.fmeter.ru/download/_ftp/eCargosens-wireless-axle-load-monitoring-system/% | |||
* '''<big>[https://www.fmeter.ru/produktsiya/wireless-axle-load-monitoring-system/ecargosens/#active | |||
* '''<big>[https://www.fmeter.ru/download/#ecargosens | |||
Revisión actual - 23:26 21 abr 2026

El sistema de monitoreo de carga eCargosens (en adelante, el sistema) para vehículos con suspensión neumática está diseñado para monitorear la carga de cada eje del chasis del vehículo, basándose en la medición de la presión del aire en el sistema de suspensión neumática.
El sistema eCargosens consta de una unidad central eCargosens DS (en adelante, unidad central) y varias unidades de medida o sensores eCargosens Air (en adelante, sensor o sensores). La cantidad de Sensores instalados en el vehículo depende de la cantidad de ejes que tenga el vehículo.
Los Sensores miden la presión del aire y, posteriormente, el peso (carga). La unidad central sirve como retransmisor entre los sensores y un equipo GPS.
Unas características más detalladas de la unidad central están presentadas en la especificación del dispositivo.
Unas características más detalladas del sensor están presentadas en la especificación del dispositivo.
Principio del funcionamiento y transmisión de los datos
Los sensores deben estar conectados al sistema de suspensión neumática del vehículo. Miden la presión del aire en la suspensión neumática y calculan el peso que se distribuye en un eje particular basándose en una tabla de calibración que deben crear y guardar en su memoria.

El/los Sensor(es) transmiten sus parámetros a la unidad central a través de Bluetooth 5.0 LR de acuerdo con el protocolo de comunicación de datos Escort eCargoSens.
Los sensores transmiten sus paquetes de datos cada 2 segundos.
La presión del aire se mide cada 30 segundos, pero las mediciones se filtran (filtración es 5 medidas) y luego se procesan mediante un algoritmo especial.
Luego, la unidad central retransmite lo recibido desde los sensores a un equipo GPS, a través de la interfaz RS-485, de acuerdo con el protocolo de comunicación LLS.
Los parámetros transmitidos por el(los) Sensor(es) son:
- Peso o carga por eje en kg (siempre que la tabla de calibración esté almacenada en la memoria de un Sensor);
- Presión del aire en Pa;
- Voltaje de la batería en V;
Los parámetros retransmitidos por la unidad central son:
- Peso o carga por eje en kg (siempre que la tabla de calibración esté almacenada en la memoria de un Sensor); tal como se recibió del(los) Sensor(es);
- Presión del aire en Pa; tal como se recibió del(los) Sensor(es);
- Voltaje de la batería en V; tal como se recibió del(los) Sensor(es);
- RSSI (indicador de la establilidad de conexión entre la unidad central y el sensor) calculado por la unidad central para cada Sensor en particular
Nota para desarrolladores
La unidad central retransmite los parámetros según el protocolo LLS en respuesta a la solicitud de nivel de combustible y temperatura (debido a que el protocolo LLS fue diseñado inicialmente para la transmisión del sensor de nivel de combustible)
31$XX$06$CRC-8 Maxim (XX representa la dirección de red de 00 a FF en HEX (0…255 en DEC));
La salida de datos se transmite como 3E$XX$06$TT$LVLV$CRC-8 Maxim, donde
XX -dirección de red,
TT - parámetro de temperatura (1 byte, valor HEX),
LVLV - valor de nivel (2 bytes, little endian);
Por tanto, se utiliza una dirección de red para transmitir un par de parámetros enviados por el/los Sensor(es) y retransmitidos por la unidad central.
Las lecturas de presión se transmiten después de dividirlas por 100. Ejemplo: Si la lectura de presión es 700345 Pa pero el valor transmitido a través de la interfaz RS-485 será 7003.
| Par de parámetros (como se indica en la configuración RS-485 de la unidad central) | Parámetro de temperatura | Parámetro de nivel |
|---|---|---|
| RSSI (instensidad de señal bluetooth) | Peso (kg) | |

|
RSSI (instensidad de señal bluetooth) | Presión (Pa) |
| Vbat (voltaje de batería) | Peso (kg) | |
| Vbat (voltaje de batería) | Presión (Pa) | |

|
RSSI (instensidad de señal bluetooth) | Vbat (voltaje de batería) |
¡OJO! El rastreador GPS al que planea conectar la unidad central debe tener la interfaz RS-485, el protocolo LLS y admitir tantas direcciones de red como necesite para la transmisión de todos los parámetros relevantes del sensor.
Instalación y configuración del sistema eCargoSens
Antes de instalar el sensor es necesario:
- Inspeccionar el sistema de suspensión neumática;
- Medir el diámetro de los tubos que conectan los muelles neumáticos de la suspensión neumática y disponer de los accesorios para poder conectar los tubos de los Sensores a los tubos de la suspensión neumática;
El diámetro estándar de los tubos del sensor es de ⌀ 10 mm.
La conexión del sensor a la cámara de aire se muestra en las siguientes figuras.

.png)
.png)
.png)
.png)
Antes de instalar el sensor, asegúrese de anotar sus números de serie y direcciones MAC y en qué eje se instalará cada sensor. Además, anote las direcciones de red colocadas en la unidad central que se utilizarán para la transmisión de los datos de cada sensor.
Ejemplo:
| Eje | Número de serie de sensor (6 últimos dígitos) | Dirección MAC | Direcciones de red |
| eje trasero de camión | XXXXXX | AA:AA:AA:AA:AA:AA | 3,4 |
| eje delantero de semirremolque | ZZZZZZ | BB:BB:BB:BB:BB:BB | 5,6 |

Emparejamiento de sensores con la unidad central
Una vez instalados los sensores, es necesario emparejarlos con la unidad central y configurarlos.
Para conectar la unidad central y configurarla a través de la aplicación, conecte sus cables rojo (PWR) y negro (GND) a una fuente de alimentación.
Ejecute la aplicación (disponible en AppStore y Google Play), asegúrese de que el servicio de geolocalización de su teléfono esté activado y que la aplicación tenga permiso para acceder a él.
Habilite el Bluetooth.
Android eCargosens: enlace para descargar
IOS eCargosens: enlace para descargar.

Luego seleccione el idioma si es necesario y presione Comenzar. Seguidamente, toque la unidad central que necesita.


Toque Configuración de sensores. Ingrese la contraseña del integrador (666666 por defecto)


Toque el botón ![]() y elige Conectar sensor eCargoSens Air. Ingrese la contraseña de usuario (000000 por defecto).
y elige Conectar sensor eCargoSens Air. Ingrese la contraseña de usuario (000000 por defecto).



Luego ingrese el MAC del sensor y pulse Conectar.

Después agregue tantos sensores como sea necesario (hasta 10 sensores a una unidad central). Para desconectar el sensor, manténgalo presionado hasta que aparezca el botón Desconectar, luego presione y borre el sensor.


Calibración de sensores
Para calibrar el sensor, debe pesar cada eje en el que está instalado. Es importante hacerlo 2 veces.
1) cuando el semirremolque o remolque del vehículo está vacío;
2) cuando está cargado alrededor del 30-40% de la carga máxima. La carga debe colocarse de manera que garantice que el peso se distribuya entre los ejes de manera más o menos uniforme.
Necesitará básculas para vehículos. Coloque la báscula sobre una superficie plana. Asegúrese de que una vez colocado el eje en la báscula quede al mismo nivel que los demás ejes.
¡Ojo! Es probable que las básculas de unas organizaciones del control de peso no sean aplicables para pesar la unidad ya que estes dispositivos pueden no tener en cuenta el peso de cada eje del vehículo
Luego anote el valor de presión (se representa en Visualización de datos) y el valor de peso (puede ser tomado desde la pantalla digital de las básculas). Así que, necesita dos pares de valores de Presión\Peso para guardarlos en la memoria de cada Sensor.
¡Ojo! Es necesario esperar a que el valor de presión se estabilizca. Eso puede tomar algun tiempo a causa de la pequeña demora en transmitir los datos desde el sensor a la unidad central y, luego, al smartphone. Además, después de que la posición del vehículo cambie, la presión en una bolsa de aire puede cambiar también Asegúrese que ningún sensor muestra el RSSI de -127dBm (pérdida de conexión) y que el RSSI cambia frecuentemente

Posteriormente, abra la aplicación, conecte la unidad central, abra el menú de Configuración del sensor y seleccione el sensor que necesita calibrar.
Cuando conecte el sensor por primera vez, se le pedirá que configure una contraseña. A partir de ahí, cada vez que conecte el sensor, la aplicación le pedirá que introduzca la contraseña previamente establecida.
Una vez que el menú del sensor está abierto, puede ver sus lecturas actuales. Toque el botón Calibrar para abrir el menú de calibración.



Después, presione el botón ![]() . Luego ingrese la lectura de Presión (de la pantalla con los datos del Sensor) y la lectura de Peso (de la báscula) y toque Ingresar.
Para editar la tabla, mantenga presionada una de sus líneas y luego agregue una línea más, cambie la seleccionada o elimínela.
. Luego ingrese la lectura de Presión (de la pantalla con los datos del Sensor) y la lectura de Peso (de la báscula) y toque Ingresar.
Para editar la tabla, mantenga presionada una de sus líneas y luego agregue una línea más, cambie la seleccionada o elimínela.



Una vez terminada la tabla, toque el botón Guardar. Repita el procedimiento de pesar y configurar la tabla para cada sensor.

Puede agregar más de 2 líneas si tiene la posibilidad de pesar cada eje mientras la carga en el semirremolque es diferente, pero 2 líneas serán suficientes en la mayoría de los casos. De todos modos, cuantos más pares de valores haya en la tabla, más preciso será el recálculo del peso.
El número máximo de líneas es 20.
Configuración de RS-485
Para habilitar la transmisión de los datos, que la unidad central recibe de los Sensores emparejados con ella vía Bluetooth, a un equipo GPS, mediante la interfaz RS-485, conecte la unidad central y abra el menú de Configuración RS-485. Seleccione uno de los sensores emparejados allí.


Luego seleccione el par de parámetros que necesita transmitir y habilítelo. Después de eso, seleccione la dirección de red que se utilizará para la transmisión de ese par, desde la unidad central al equipo GPS.
-

Elegir los parámetros enviados por RS-485
-
Ingresar la dirección de red
-

Ingresar la dirección de red, si ya hay direcciones en uso



¡OJO! Asegúrese de que a cada par de parámetros en el menú de cada sensor se le asigne una dirección de red única. Si tiene varios otros sensores cableados conectados al mismo equipo GPS a través de la interfaz RS-485, recuerde que también ya ocupan una o varias direcciones de red, por lo que debe evitar asignar a la unidad central cualquiera de esas direcciones de red
Por ejemplo, si hay un sensor de nivel de combustible cableado al que se le ha asignado la dirección de red 1, la dirección 1 no se puede asignar a la unidad central dicha dirección de red.
Tenga en cuenta que la aplicación podría leer Todas las direcciones de red son libres, pero no puede verificar si hay otros sensores cableados conectados a su GPS. Solo verifica qué direcciones de red se han asignado a cada Sensor emparejado en la configuración de la unidad central.
Visualización de los datos
Usted, su cliente o el conductor del camión pueden acceder en cualquier momento a las lecturas actuales de sensores vinculadas a una cierta unidad central que se transmiten a través de la aplicación.
Conecte la unidad central.
Luego toque Visualizar datos. En la siguiente pantalla la aplicación mostrará las lecturas de todos los sensores emparejados con la unidad central.


¡OJO! Al seleccionar el lugar en el que instalará la unidad central, asegúrese de comprobar si el RSSI promedio de cada sensor, medido en 2 o 3 minutos, está dentro del rango de -35 dBm a -100 dBm. Si no es así, intente acercar la unidad central a los sensores para minimizar los riesgos de pérdidas de conexión en el futuro
¿Cuántos sensores se requieren?
La recomendación general es instalar tantos sensores como ejes tenga el vehículo. En otras palabras: 1 sensor por 1 eje.
Es posible que, en algunos casos, se pueda utilizar un sensor para controlar la carga en varios ejes, siempre que las cámaras de aire que soportan esos ejes estén unidas en un circuito neumático de suspensión.
Los siguientes son algunos ejemplos de posible instalación de varios sensores:

A y B son posibles ranuras donde se tendrían que instalar los 2 sensores para monitorear la carga de cada eje.

En este caso es posible que se pueda instalar solo un sensor en el punto A o B.
Sin embargo, necesitaría recopilar las lecturas de presión del sensor y tener 2 sensores virtuales en su plataforma de monitoreo (las tablas de calibración tendrían que guardarse y aplicarse en esos sensores virtuales).

En este caso es posible que se pueda instalar solo un sensor en el punto A o B.
Sin embargo, necesitaría recopilar las lecturas de presión del sensor y tener 2 sensores virtuales en su plataforma de monitoreo (las tablas de calibración tendrían que guardarse y aplicarse en esos sensores virtuales).
¡OJO! Se recomienda insistentemente revisar si el circuito neumático de suspensión no se divide en dos partes, es decir, no es la suspensión neumática de 2 circuitos. Si se divide, una parte del tubo neumático (cortado para que se instale el sensor) puede salir aire, mientras la otra parte mantiene "hinchada". Aún así, instalar solo un sensor puede ser suficiente, pero por ahora no hemos tenido unos casos que confirman la eficacia de este método.
.png)
En este caso se podrían instalar 6 o 3 Sensores (1 o 2 por eje) para controlar la carga del eje.
Aún es posible que la carga distribuida entre dos de los tres ejes sea más o menos igual y por lo tanto 1 o 2 sensores podrían ser suficientes.
Sin embargo, si uno de los ejes es elevable, es obligatorio instalar un sensor en él.
Si instala los sensores a una suspensión neumática que posee un eje elevable (o los varios así), debe revisar si cambia la presión en las lecturas de cada sensor instalado en la unidad con este(s) eje(s) elevado(s) y bajado(s) (subir y bajar cada eje separademente y en conjunto). Así, según nuestra experiencia, es necesario pesar el vehículo varias veces: 1) con todos los ejes elevables en posición bajada; 2) con uno de los ejes elevables en posición elevada; 3) con todos los ejes elevables en posición elevada
Configuración del sensor virtual para el eje de dirección
Para calcular el peso total de un camión semirremolque es necesario pesar tanto el eje de dirección como el eje trasero de un camión (volquete) sin semirremolque (si es camión volquete, sin carga). Si hay varios ejes delanteros y/o traseros, es necesario pesar cada uno de ellos.
A continuación, en el menú de Configuración del sensor, presione el botón ![]() y seleccione la opción Agregar el eje principal (también se llama Agregar cálculo de carga en eje anterior)
y seleccione la opción Agregar el eje principal (también se llama Agregar cálculo de carga en eje anterior)

Después de eso se creará un sensor virtual para un eje direccional y tendrá una MAC FF:FF:FF:FF:FF:F1. Puede abrir sus configuariones pulsando a su icono.

- En la configuración, complete el Número (ordinal) de eje trasero №1 con el número de un sensor instalado en un eje trasero. El número de un sensor está determinado por su posición del 1 al 10 en la lista.
- Introduzca el peso de un eje trasero sin semirremolque en Carga del eje de tracción №
- En caso de que haya varios ejes traseros, agregue otro presionando el botón ![]() y luego ingrese el número de un sensor instalado en él y también su peso sin semirremolque. Para eliminar un eje trasero creado accidentalmente, presione el
y luego ingrese el número de un sensor instalado en él y también su peso sin semirremolque. Para eliminar un eje trasero creado accidentalmente, presione el ![]() .
.


- En el caso de que haya varios sensores instalados en un eje trasero, puede extender la lista de sensores para un eje pulsando el botón 

Así se observan los números de ejes correspondientes. Estes ejes, a su turno, se promediarán para que el cálculo del eje virtual entienda los sensores instalados en un ejes, no en los ejes diferentes.

Para borrar el sensor desde el campo de eje, pulse el botón ![]()

Luego ingrese los siguientes aspectos:
- Peso de tractocamión sin remolque (o peso de autovolquete vacío) calculado sumando el peso de todos los ejes donde se instalaron los sensores excepto del semirremolque
- Distancia entre eje anterior y eje de tracción; es decir, una distancia entre el centro del eje delantero y el centro del eje trasero del camión sin remolque
- Distancia entre eje anterior y quinterrueda; es decir, una distancia entre el centro del eje delantero y un brazo de arrastre (o el centro de gravedad de un dumper). Este valor no debe superar o equivaler a la distancia entre el centro del eje delantero y el centro del eje trasero
- Distancia entre ejes de dirrección; es decir, una distancia entre los ejes direccionales delanteros (en caso de que sean dos); si solo hay un eje direccional, introduzca el valor mínimo de 51 cm
- seleccione el modo de 2 ejes, si hay dos ejes direccionales
Al terminar rellenando dichos datos, presione Guardar.

¡OJO! La unidad central calcula el peso de un eje direccional y el peso total de un camión semirremolque, solo si las tablas de calibración están guardadas en la memoria de los sensores
¡ATENCIÓN! Para utilizar correctamente el modo de 2 ejes, se debe añadir a la unidad central un segundo eje de dirección virtual con la misma configuración que el primero. Ambos sensores virtuales deben tener seleccionado el modo de 2 ejes.
Para eliminar un sensor virtual de un eje direccional, mantenga presionado su botón hasta que aparezca la opción Desconectar.


Para ver las lecturas del eje de dirección desde un dispositivo periférico (por ejemplo, un rastreador GPS) a través de la interfaz RS-485, vaya a la sección de Configuración RS-485 para seleccionar un sensor virtual de un eje de dirección. Habilite el parámetro Peso, RSSI y establezca una determinada dirección de red para él.
Para conectar una unidad central a un Indicador I5 y ver la suma de todos los sensores, incluido el sensor virtual de un eje de dirección, configure el I5 para que pueda leer o solicitar las direcciones de red configuradas para ciertos sensores en la unidad central. En la configuración de pantalla del I5, seleccione la opción Nivel total TD.
Conexión al equipo GPS

| Color de cable | Denominación |
|---|---|
| naranja | línea A RS-485 |
| blanco | línea B RS-485 |
| rojo | +U alimentación |
| negro | -U alimentación |
En cuanto al interfaz RS-485, con la unidad central se puede emparejar cualquier dispositivo de otra marca que tiene siguientes parámetros:
Protocolo de transmisión de los datos, LLS
Baudrate, 19200 kbps
Data size, 8 bits
Parity, None
Stop bits, 1